Algorithms to Remember
递归主定理
$T(n) = a T(n/b) + f(n)$, $c = \log_b a$
- $f(n) = O(n^{c-\epsilon})$: $T(n) = \Theta(n^c)$
- $f(n) = \Theta(n^{c}\log^k n)$: $T(n) = \Theta(n^c \log^{k+1}n)$
- $f(n) = \Omega(n^{c+\epsilon})$, $af(n/b)\le kf(n)$ (正则条件): $T(n) = \Theta(f(n))$
AVL 树(平衡二叉搜索树)
- 旋转:左旋/先右旋后左旋/右旋/先左旋后右旋(根据失衡节点与子节点的平衡因子决定)
- 插入、删除:自底向上解决失衡节点
红黑树
WIP
图的遍历
DFS 和 BFS 均有 $O(m+n)$ 时间复杂度和 $O(n)$ 空间复杂度
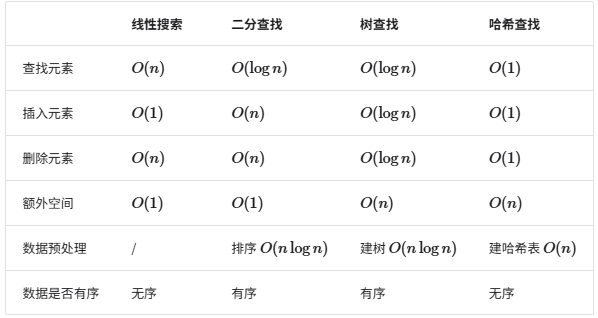
搜索算法
- 暴力搜索:线性搜索、BFS、DFS
- 自适应搜索:二分查找、哈希表、二叉搜索树、AVL 树
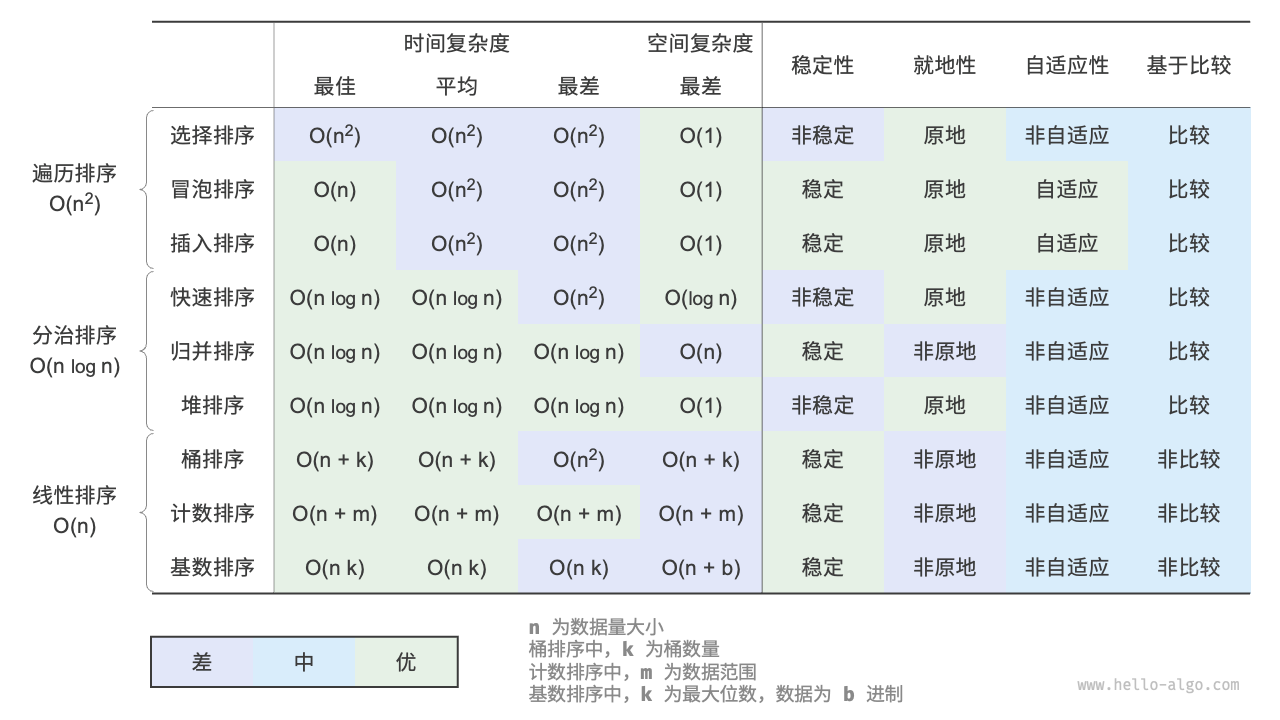
排序算法
计数排序:计算计数数组的前缀和,从后往前填充
图论算法
- 并查集:第一次查询操作$O(\log n)$(包括
find和join),后续趋近于$O(1)$ - DFS、BFS:$O(n+m)$(使用栈/队列实现,注意标记和检测
visited数组的时间) - 最小生成树:Prim $O(n^2)$(距离数组实现)/$O(m\log m)$(优先队列实现)(这个关系与Dijkstra算法一致),Kruskal $O(m\log m)$(优先队列、并查集实现)
- 拓扑排序:$O(n+m)$(本质上与BFS相同)
- 通用搜索算法总结:$O(n+m)$(栈/队列)、$O(m\log m)$(优先队列,如果可以修正队列元素则为$O((n+m)\log n)$)、$O(n^2)$(距离数组)
- DFS、BFS:使用栈与队列,指定起点(优先级/距离均为1)
- 拓扑排序:使用队列,起点为入度为0的节点(优先级/距离均为1)
- Dijkstra:使用节点到起点的距离作为距离数组元素/边的优先级
- Prim:使用节点到生成树到距离作为距离数组元素/边的优先级
- 最短路径:
- Dijkstra:单源、权值非负,$O(n^2)$(稠密图)/$O(m\log m)$(稀疏图)
- A*可用于权值修正,更快找到首个有效解
- 要添加边数限制,则不适用于Dijkstra,只能采用二维距离数组(动态规划思想,同时考虑不同边数的路径),$O(km)$
- Bellman-Ford:单源、负权边、检测负权回路,$O(mn)$(可使用队列优化稀疏图平均情况、最优情况的时间复杂度)
- Floyd-Warshall:多源、负权边、检测负权回路(算法结束后检测
dist[i][i]),$O(n^3)$(矩阵可压缩为二维)
- Dijkstra:单源、权值非负,$O(n^2)$(稠密图)/$O(m\log m)$(稀疏图)